1、
間隙探測(cè)方案介紹
2.1
基于整側(cè)站臺(tái)的激光探測(cè)方案
2.1.1 方案簡(jiǎn)述
本方案采用的是激光探測(cè)方式,系統(tǒng)組成部件有報(bào)警主機(jī)、探測(cè)光幕和線纜等。探測(cè)光源采用紅外激光光源,在站臺(tái)門和列車門之間的間隙設(shè)置一道由2~4束不可見紅外激光光束組成的探測(cè)光幕,對(duì)間隙障礙物進(jìn)行探測(cè)報(bào)警。對(duì)于直線站臺(tái),每側(cè)站臺(tái)設(shè)置1套探測(cè)光幕,即可實(shí)現(xiàn)探測(cè)需求;對(duì)于曲線站臺(tái),一般是直線段+曲線段這種方式最為常見,直線段部分設(shè)置1套探測(cè)光幕,曲線段每節(jié)車廂設(shè)置1套探測(cè)光幕,或根據(jù)實(shí)際曲度具體設(shè)置,每套光幕的探測(cè)區(qū)間形成一個(gè)防區(qū),防區(qū)數(shù)通常設(shè)置為2~6個(gè)。
報(bào)警主機(jī)用于接收探測(cè)光幕的探測(cè)信號(hào)并進(jìn)行邏輯處理,輸出繼電器無源觸點(diǎn),可接入站臺(tái)門系統(tǒng)安全回路。當(dāng)系統(tǒng)探測(cè)到間隙存在障礙物時(shí),將發(fā)出聲光報(bào)警,告知司機(jī)和站臺(tái)工作人員,同時(shí)切斷安全門系統(tǒng)的安全回路,此時(shí)列車接收不到發(fā)車碼,無法發(fā)車,從而保證了行車安全。
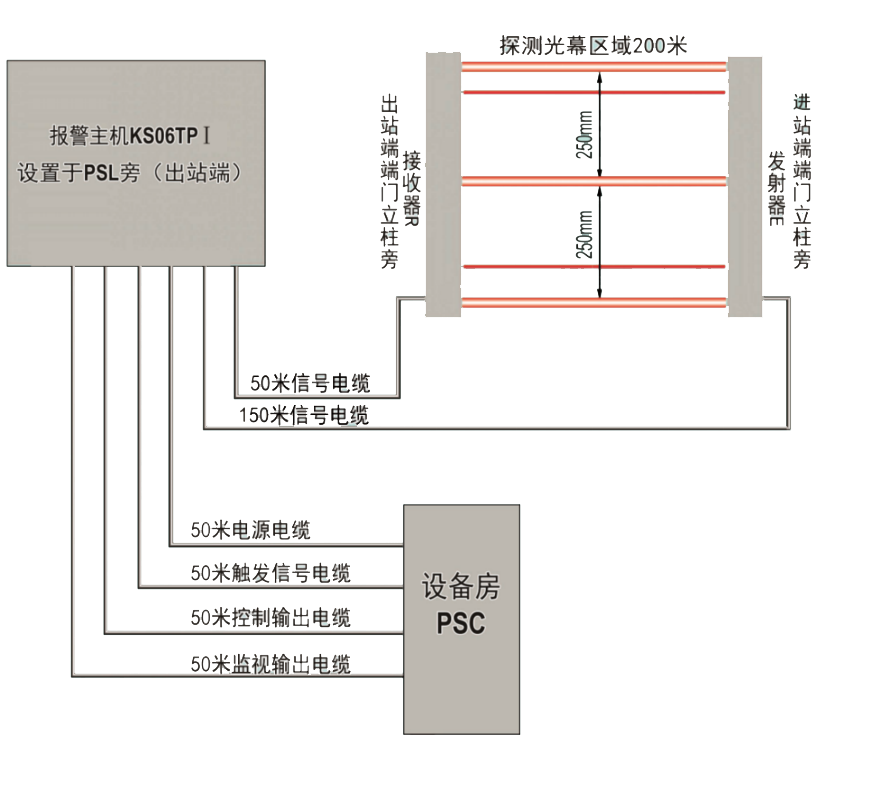
圖1 基于整側(cè)站臺(tái)的激光探測(cè)系統(tǒng)
2.1.2 方案優(yōu)缺點(diǎn)
優(yōu)點(diǎn):激光的單色性和能量集中的特點(diǎn),確保很強(qiáng)的穿透能力,即使在大霧或粉塵的環(huán)境里也能有效傳輸,有很好的抗粉塵干擾的能力;激光的發(fā)散角小,不易受外界干擾,誤報(bào)率低;另外,設(shè)備部件少,易于后期維保。
缺點(diǎn):?jiǎn)我环绤^(qū),無法精準(zhǔn)定位障礙物位置;對(duì)光調(diào)試需要掌握一定的技巧;體積較大,安裝受車輛限界約束。
2.2
基于單個(gè)滑動(dòng)門的紅外探測(cè)方案
2.2.1 方案簡(jiǎn)述
本方案采用的是紅外探測(cè)方式,系統(tǒng)組成部件有紅外控制器、探測(cè)光幕和線纜等。探測(cè)光源采用紅外LED光源,在站臺(tái)門和列車門之間的間隙設(shè)置若干道由2~4束不可見紅外光束組成的探測(cè)光幕,對(duì)間隙障礙物進(jìn)行探測(cè)報(bào)警。直線站臺(tái),每個(gè)滑動(dòng)門設(shè)置1套探測(cè)光幕,每側(cè)站臺(tái)共設(shè)置24套(24滑動(dòng)門站臺(tái))探測(cè)光幕,即可實(shí)現(xiàn)探測(cè)需求。
紅外探測(cè)的輸出信號(hào)直接接入每個(gè)滑動(dòng)門的門控單元DCU,由DCU識(shí)別探測(cè)信號(hào)并進(jìn)行處理,若在滑動(dòng)門關(guān)閉過程中紅外線被障礙物遮擋,則DCU將控制滑動(dòng)門重新打開,此時(shí)該門單元的關(guān)閉且鎖緊信號(hào)斷開,整側(cè)站臺(tái)門的安全回路也隨之?dāng)嚅_,列車也就無法發(fā)車,從而保證乘客及列車安全。當(dāng)障礙物移除后,報(bào)警消除,安全回路恢復(fù)導(dǎo)通,列車可正常發(fā)車。

圖2 基于單個(gè)滑動(dòng)門的紅外探測(cè)系統(tǒng)
2.2.2 方案優(yōu)缺點(diǎn)
優(yōu)點(diǎn):成本低;每道門的門頭指示燈可顯示障礙物報(bào)警信息,以顯示障礙物位置,便于運(yùn)營(yíng)管理;支持單獨(dú)旁路;
缺點(diǎn):需要站臺(tái)門方面配合修改DCU程序;安裝、調(diào)試、維保工作量大;設(shè)備數(shù)量多,故障點(diǎn)多;
2.3
激光雷達(dá)探測(cè)方案
2.3.1 方案簡(jiǎn)述
本方案采用基于TOF飛行時(shí)間技術(shù)的激光雷達(dá)。為實(shí)現(xiàn)針對(duì)每個(gè)門單元的間隙制定高精度探測(cè),在每節(jié)車廂中間位置對(duì)應(yīng)的站臺(tái)門固定門位置,軌道側(cè)設(shè)置一臺(tái)激光雷達(dá),對(duì)每節(jié)車廂對(duì)應(yīng)的4道滑動(dòng)門及其固定門進(jìn)行探測(cè)掃描。每側(cè)站臺(tái)共設(shè)置6臺(tái)安全激光掃描儀即可實(shí)現(xiàn)整側(cè)站臺(tái)的探測(cè)掃描。
激光雷達(dá)將探測(cè)信號(hào)傳輸至報(bào)警主機(jī);同時(shí)將探測(cè)數(shù)據(jù)(角度、距離)通過以太網(wǎng),經(jīng)交換機(jī)匯總至PSC監(jiān)控主機(jī)。監(jiān)控主機(jī)對(duì)接收到的探測(cè)數(shù)據(jù)進(jìn)行二次處理,解析出障礙物的相對(duì)位置(例如1號(hào)滑動(dòng)門左門報(bào)警),并予以顯示,從而可以實(shí)現(xiàn)間隙障礙物的準(zhǔn)確定位。
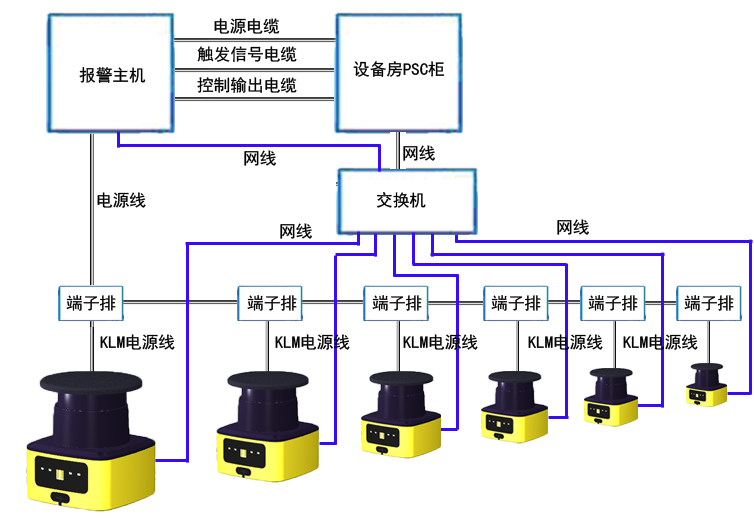
圖3激光雷達(dá)探測(cè)系統(tǒng)
2.3.2 方案優(yōu)缺點(diǎn)
優(yōu)點(diǎn):二維區(qū)域掃描,盲區(qū)小;精準(zhǔn)定位障礙物;安裝不受車輛限界約束;支持單獨(dú)旁路;
缺點(diǎn):成本高;維保工作量大;暫無成熟的工程實(shí)例。
2、
三種方案性能比較分析
從下可以看出,激光探測(cè)方案有著誤報(bào)率低、檢測(cè)范圍大、抗干擾性強(qiáng),調(diào)試簡(jiǎn)單等明顯的優(yōu)勢(shì);紅外探測(cè)的優(yōu)勢(shì)主要是成本低;激光雷達(dá)探測(cè)的優(yōu)勢(shì)在于盲區(qū)小,安裝不受車輛限界約束,適用性更廣。目前,國(guó)內(nèi)地鐵線路成熟應(yīng)用的間隙探測(cè)方案主要是激光探測(cè)和紅外探測(cè),激光雷達(dá)探測(cè)屬于新興技術(shù),安全性和可靠性還有待驗(yàn)證,尤其是窗口耐臟污性能,極大的制約著系統(tǒng)的可靠性。相信在不久的將來,隨著激光雷達(dá)技術(shù)的成熟及制造成本的降低,該技術(shù)能夠廣泛的應(yīng)用在站臺(tái)門間隙探測(cè)
表1:探測(cè)方案性能對(duì)比表
|
方案/性能 |
激光探測(cè) |
單門紅外 |
激光雷達(dá) |
|
誤報(bào)率 |
低 |
低 |
低 |
|
檢測(cè)范圍 |
70-300米,多點(diǎn),有盲區(qū) |
5-30米,多點(diǎn),有盲區(qū) |
半徑12米,二維平面 |
|
抗干擾性 |
強(qiáng) |
一般 |
強(qiáng) |
|
調(diào)試 |
對(duì)光簡(jiǎn)單 |
對(duì)光簡(jiǎn)單,但設(shè)備數(shù)量多,工作量大 |
需設(shè)置掃描防區(qū) |
|
報(bào)警方式 |
整側(cè)報(bào)警 |
單門報(bào)警 |
單門報(bào)警 |
|
成本 |
高 |
低 |
高 |
|
定位功能 |
無 |
定位到每道滑動(dòng)門 |
定位到每道滑動(dòng)門 |
